本文使用 Zhihu On VSCode 创作并发布日志中所涉及工程的github仓库:第六章 机器人仿真本章节涉及内容主要有:对机器人建模(URDF)、创建仿真环境(Gazebo)以及感知环境(Rviz)等系统性实现概念性的介绍:(复制自赵老师的讲义)URDFURDF是 Unified Robot Description Format 的首字母缩写,直译为统一(标准化)机器人描述格式,可以以一种 XML 的方式描述机器人的部分结构,比如底盘、摄像头、激光雷达、机械臂以及不同关节的自由度.....,该文件可以被 C++ 内置的解释器转换成可视化的机器人模型,是 ROS 中实现机器人仿真的重要组件。2. rvizRViz 是 ROS Visualization Tool 的首字母缩写,直译为ROS的三维可视化工具。它的主要目的是以三维方式显示ROS消息,可以将 数据进行可视化表达。例如:可以显示机器人模型,可以无需编程就能表达激光测距仪(LRF)传感器中的传感 器到障碍物的距离,RealSense、Kinect或Xtion等三维距离传感器的点云数据(PCD, Point Cloud Data),从相机获取的图像值等。以ros- [ROS_DISTRO] -desktop-full命令安装ROS时,RViz会默认被安装。运行使用命令rviz或rosrun rviz rviz。3. gazeboGazebo是一款3D动态模拟器,用于显示机器人模型并创建仿真环境,能够在复杂的室内和室外环境中准确有效地模拟机器人。与游戏引擎提供高保真度的视觉模拟类似,Gazebo提供高保真度的物理模拟
真钱棋牌游戏,其提供一整套传感器模型,以及对用户和程序非常友好的交互方式。以ros- [ROS_DISTRO] -desktop-full命令安装ROS时,gzebo会默认被安装。运行使用命令gazebo或rosrun gazebo_ros gazebo在 Ubuntu20.04 与 ROS Noetic 环境下,gazebo 启动异常以及解决:问题1:VMware: vmw_ioctl_command error Invalid argument(无效的参数)解决:echo "export SVGA_VGPU10=0" >> ~/.bashrc
source .bashrc
问题2:[Err] [http://REST.cc:205] Error in REST request解决:sudo gedit ~/.ignition/fuel/config.yaml
然后将url : https://api.ignitionfuel.org使用 # 注释再添加url: https://api.ignitionrobotics.org问题3:启动时抛出异常:[gazebo-2] process has died [pid xxx, exit code 255, cmd.....解决:killall gzserver
和killall gzclient
6.1 URDF 集成 Rviz6.1.1 准备工作首先创建功能包。单单对于机器人模型而言,所需要的依赖只有urdf,在urdf之上,ros创建了更为简单的功能包依赖xacro。所以本次功能包依赖只需添加两个urdf和xacro。然后,在新建功能包下创建以下文件夹:launch (用于存放 launch 文件)urdf (用于存储机器人模型)meshes (用于给机器人贴皮肤)config (存储配置文件)6.1.2 URDF 语法URDF 文件是一个标准的 XML 文件,在 ROS 中预定义了一系列的标签用于描述机器人模型,机器人模型可能较为复杂,但是 ROS 的 URDF 中机器人的组成却是较为简单,可以主要简化为两部分:连杆(link标签) 与 关节(joint标签),接下来我们就通过案例了解一下 URDF 中的不同标签:robot 根标签,类似于launch文件中的launch标签link 连杆标签joint 关节标签gazebo 集成 gazebo 需要使用的标签关于标签的详解可以参考:赵老师的讲义官方文档这里我就不详细介绍了,因为用标签文件写模型真的极为难受。建议使用solidworkds2urdf的 solidworkds 插件。6.1.3 solidworkds 转 URDF下载 ROS 提供的 sw_urdf_exporter 插件。我下载的是 solidworkstourdf.exe,打开后会自动设置安装路径,点击下一步。
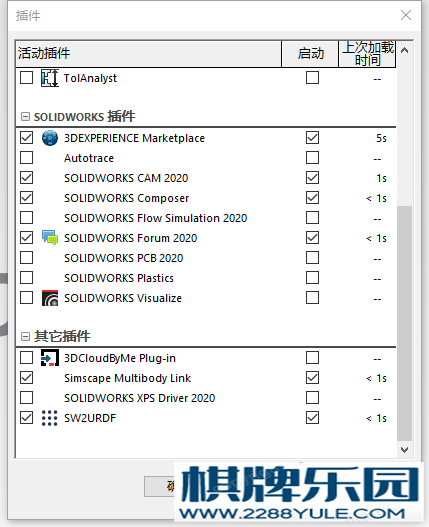
打开 solidworks 的一个空白页面 > 齿轮 > 插件在其他插件中, 在 SW2URDF 前面已经打勾。然后确定
打开一个机器人的模型我这里打开的是一个机械臂的模型。点击工具(没有工具的点左上角的 Solidworkds 图标) > Tools > Export as URDF 然后一路确认。之后会出现URDF Exportor 的属性界面:
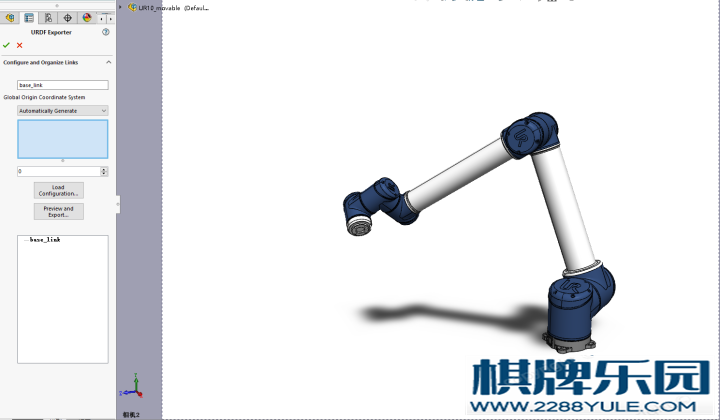
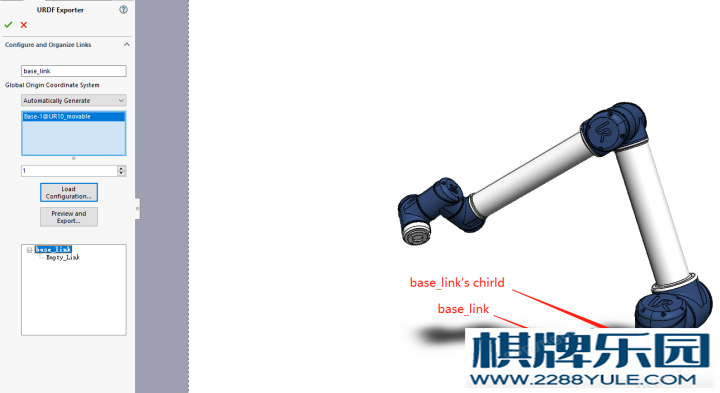
这时我们就需要一些 URDF 的基础知识了,为机器人模型设置 link 和 joint。一开始我们要设置一个 base_link,这里我选择的是机器人的底座,然后它只有一个子集(其上电机)。设置都用默认的就可以了。
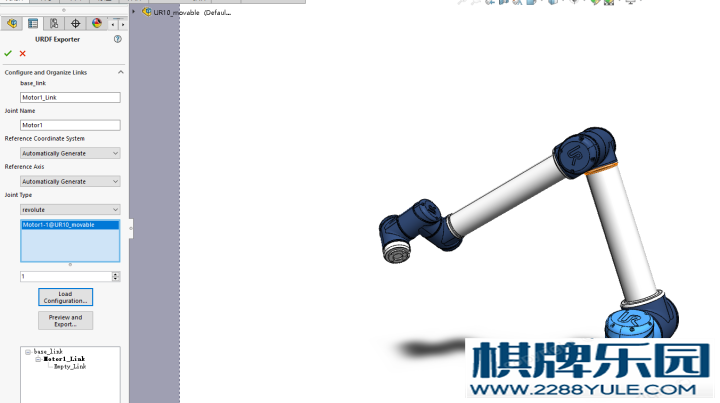
设置完第一个链接后点击下一个链接。在第二个链接的设置时,出现了一些其他的选项。有关名字的我们自己取就可以了。比较重要的是 Joint Type,这里我选择的是 revolute(如果不确定这个属性,选择自动检测也可以),然后子集也是只有一个。其他的设置都用默认的就可以了。
设置完成后再次点击下一个链接,直到最后一个链接。然后电机 preview and export 会出现一个窗口 叫做 Configure Joint Properties,在这里可以对于之前的配置做进一步的修正,比如添加关节的限制(弧度制),矫正,运动属性,安全性设置。
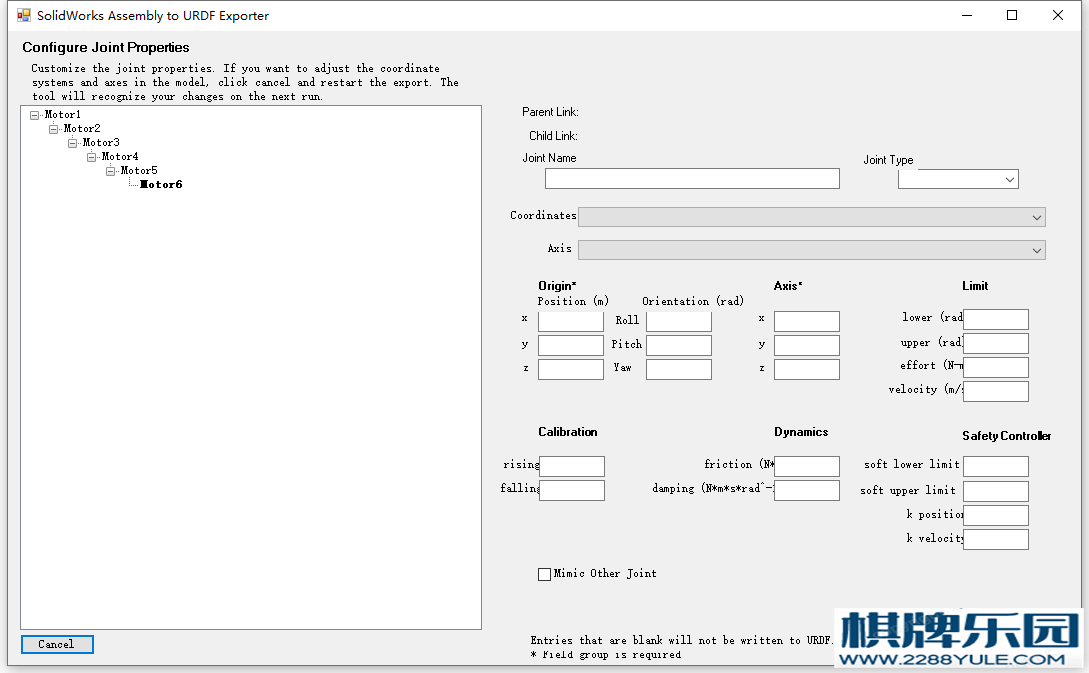
这里我发现我的 Joint Type 设置被修改成了 continuous,然后我手动改回来了,其他地方没有做改动,直接下一步。
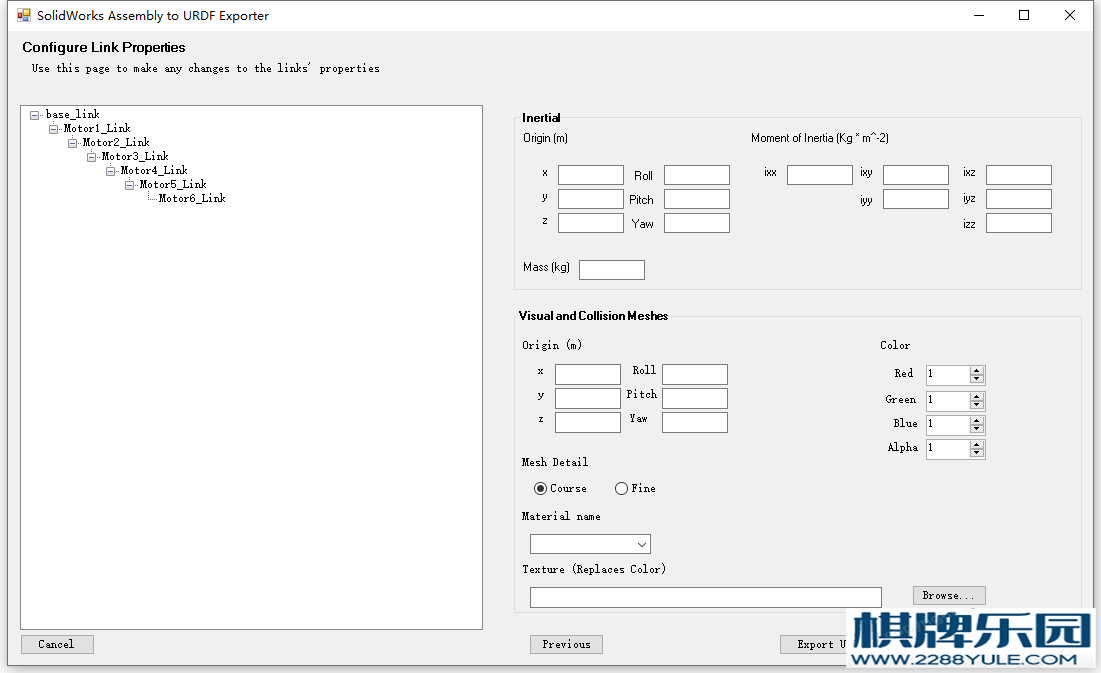
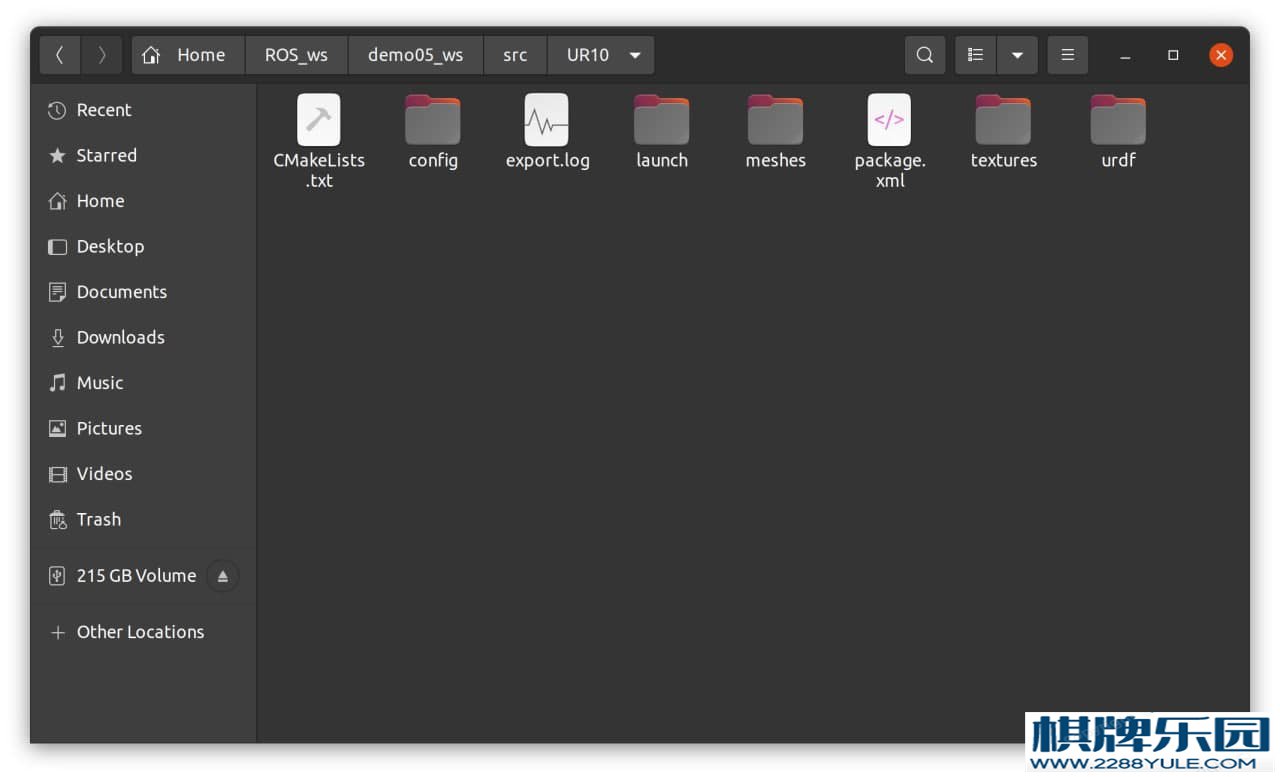
这里我们可以添加机器人每一个 link 的物理属性,这里我依然选择默认值(因为我也不会修改)然后,点击 Export URDF and Meshes,修改一下文件夹的名字(主要目的是去掉自动命名的后缀,比如.SLDASM)然后选择一个路径就可以了。进入文件夹,就可以看到下面的东西。
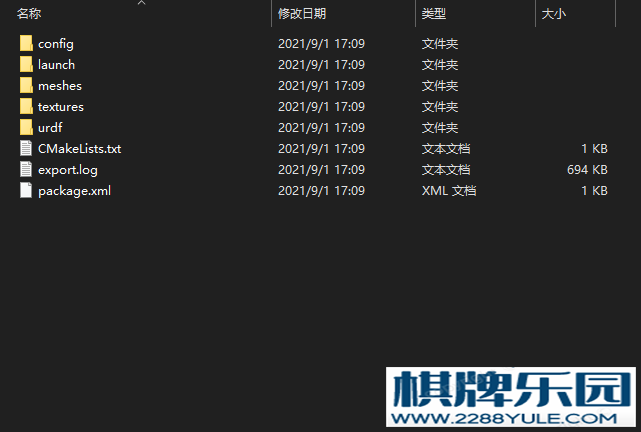
然后我们将这个文件夹复制到我们 Linux 电脑的一个 ROS 工作空间的src目录下。

此时,我们复制过来的文件已经是一个功能包了,在此窗口右击在此处打开一个终端,输入下列指令:cd ..
catkin_make

6.1.4 URDF工具再使用这个功能包之前,首先下载一个 urdf 的工具,来检查一下我们创建的urdf文件是否有问题。sudo apt install liburdfdom-tools
然后在 URDF 文件夹内使用命令:urdf_to_graphiz urdf文件
然后就会在当前目录下生成一个 pdf 文件,用于展示机器人模型的 link 与 joint 关系。
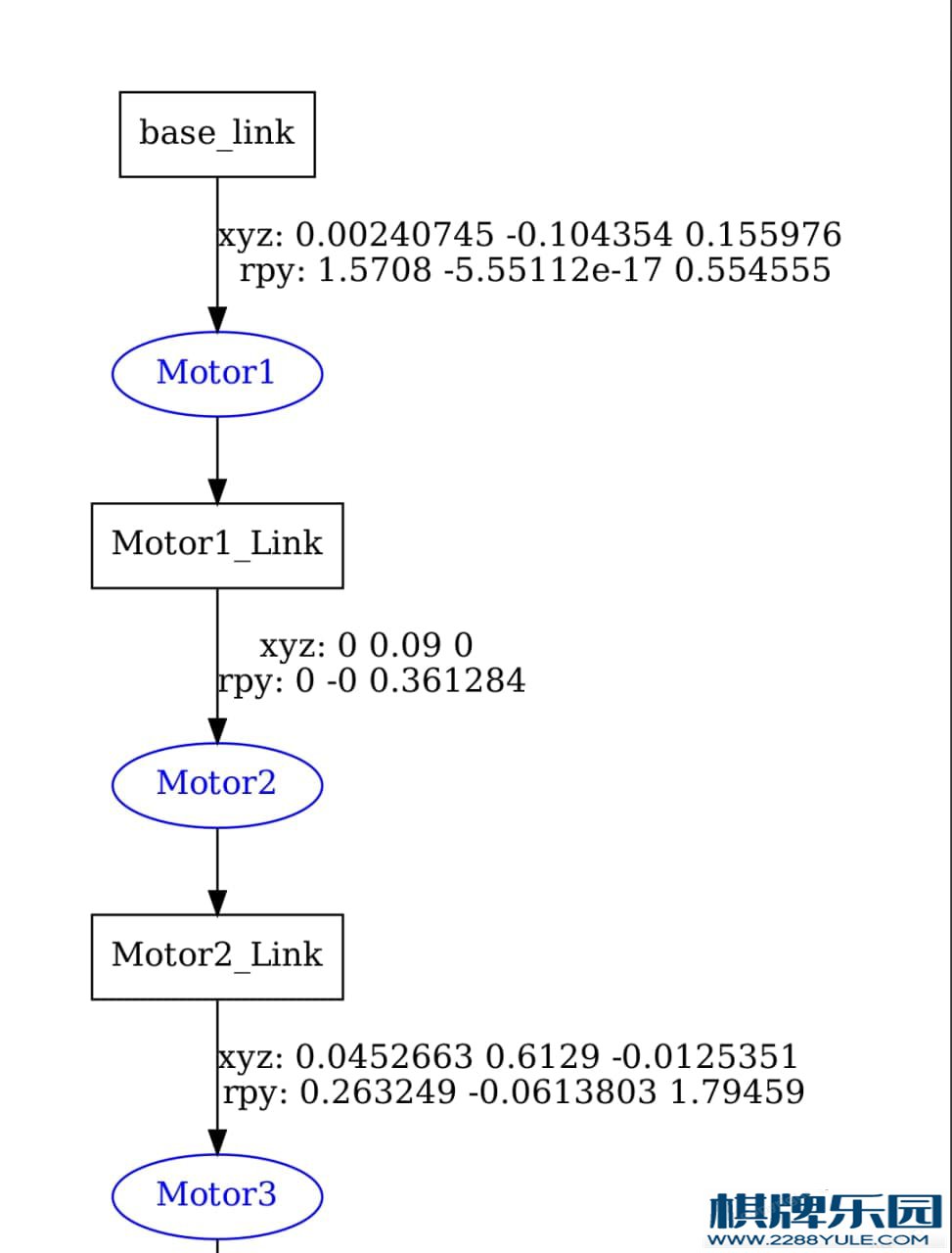
图片较长,我只截取其中一部分。这里的方块是机器人的link,椭圆是机器人joint,目前看来机器人的urdf似乎没有什么问题。6.2 在 rviz 中查看机器人基于上面的操作,在 ROS 的工作空间下使用下面的指令:source ./devel/setup.bash
roslaunch [包名] display.launch
然后就能将urdf文件在rviz中打开。刚刚打开的rviz只有一个空白的界面,这是正常的,我们需要做一些设置:
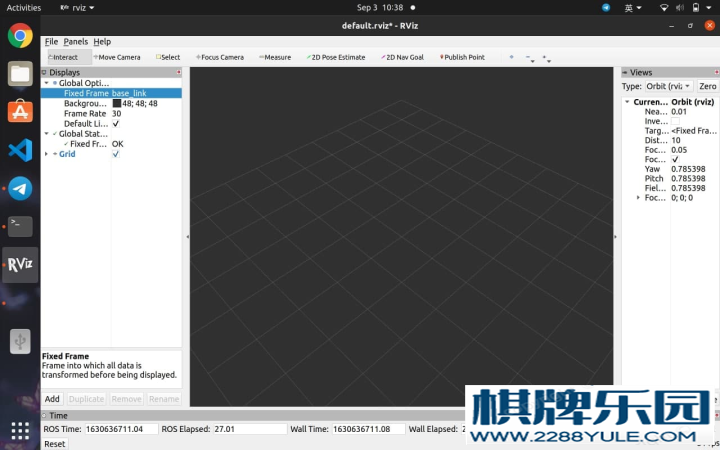
将左边 fixed frame修改成base_link点击add,添加一个机器人模型RobotModel
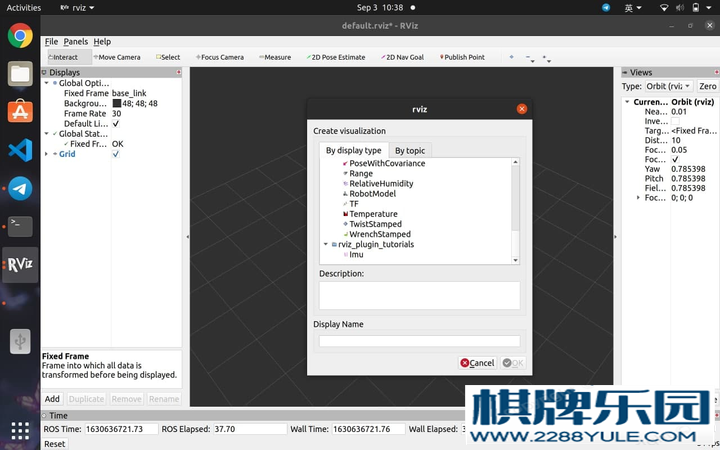
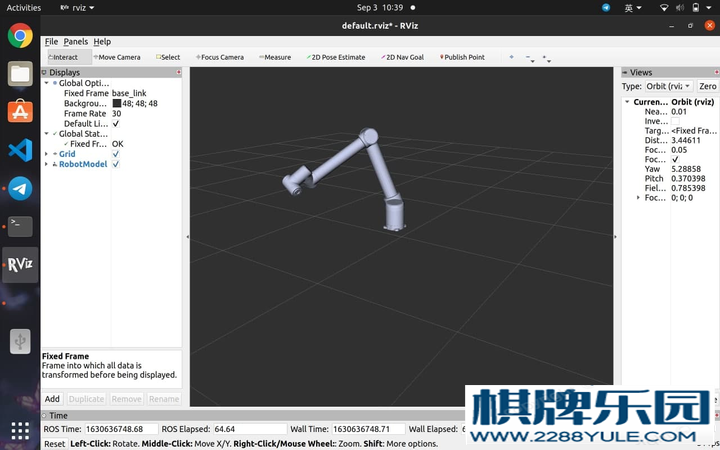
file > save configure as找到当前功能包所在的目录,在config文件夹中保存这个配置文件。其名称为自己命名.rivz
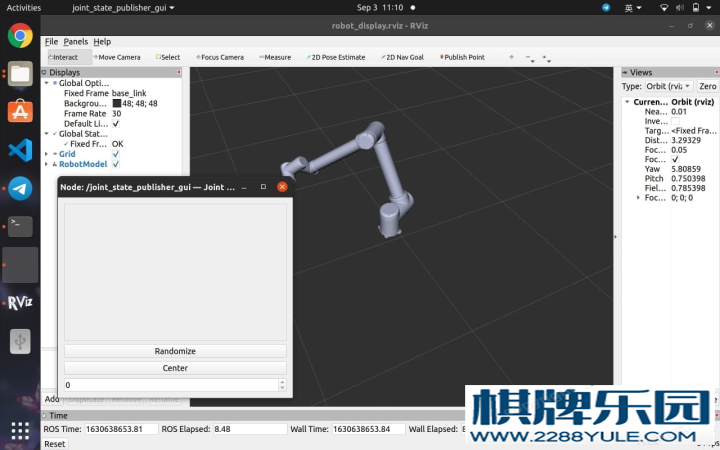
src="/uploads/allimg/220409/00091LO5-15.jpg"> 6.2.1 机器人运动测试(留坑)细心的同学可能会发现,我们在打开机器人rviz窗口的时候,同时还打开了一个窗口 -- Joint_state_publisher gui。
>
> />
</
inertial>
6.3.2 基于 solidworks 的 urdf对于使用了 solidworks 导出 urdf 的同学不用担心这个情况,文件都没问题。只需要使用launch文件就可以进入gazebo查看机器人了。使用指令:roslaunch [包名] gazebo.launch
这里我的机器人倒了,原因是地盘并没有固定在地面上,受到重力影响。并无大碍。这里补充一个小 tips:一般情况下,我们看到的3D模型的坐标系是由 3 种颜色组成的,其 xyz 的对应关系分别是 rgb(红绿蓝)工程文件:链接:https://pan.baidu.com/s/1edPcM_3t4ji2K04IyCoZSw 提取码:pp5w